PWM (MLI) :
Modulation en largeur d'impulsion
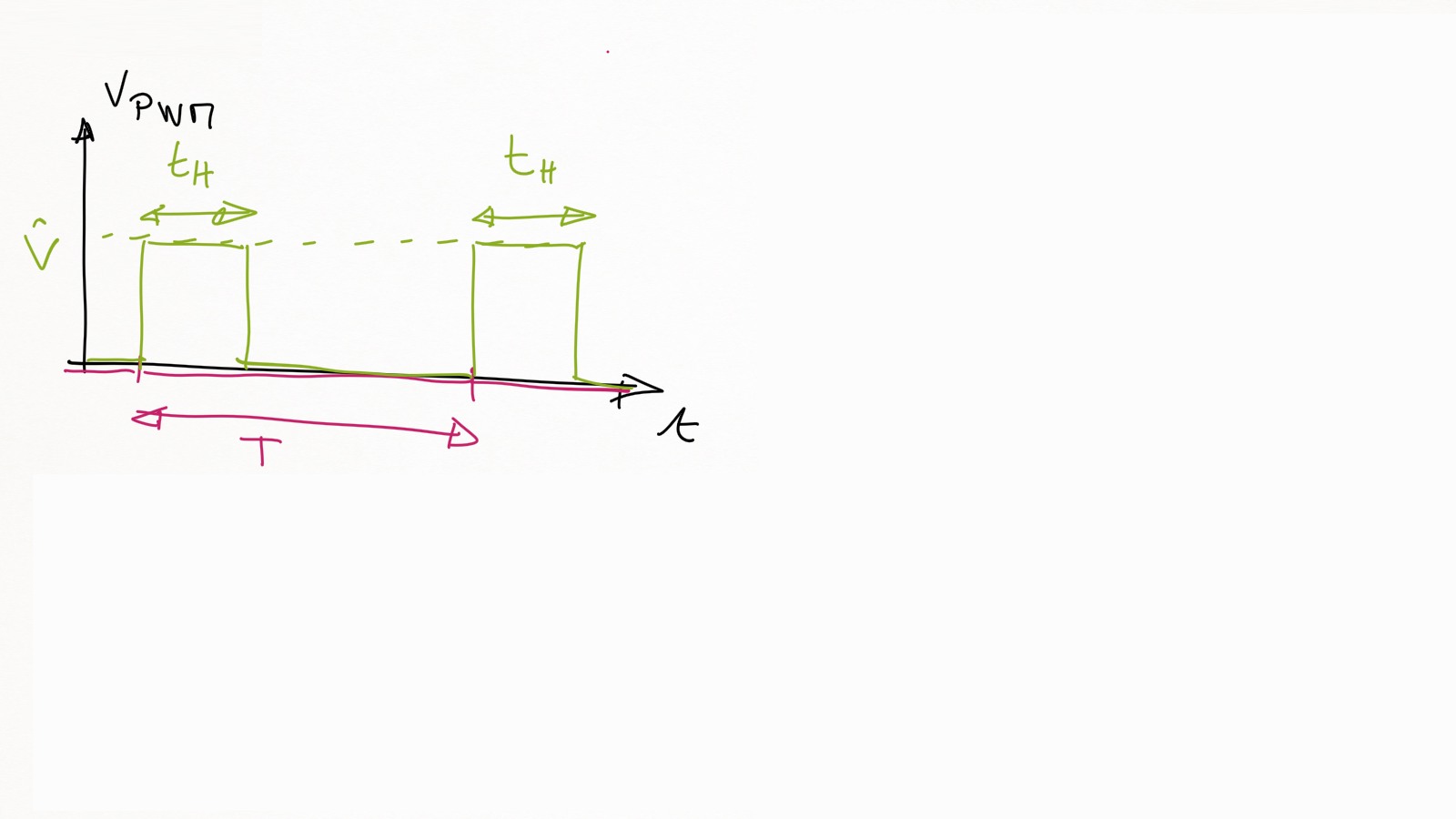
Un signal PWM (MLI) est un signal carré périodique dont la largeur de l'impulsion est réglable.
Il peut être utilisé pour :
contrôler un moteur à courant continu (MCC), contrôler l'éclairement de LEDs, contrôler un servomoteur.
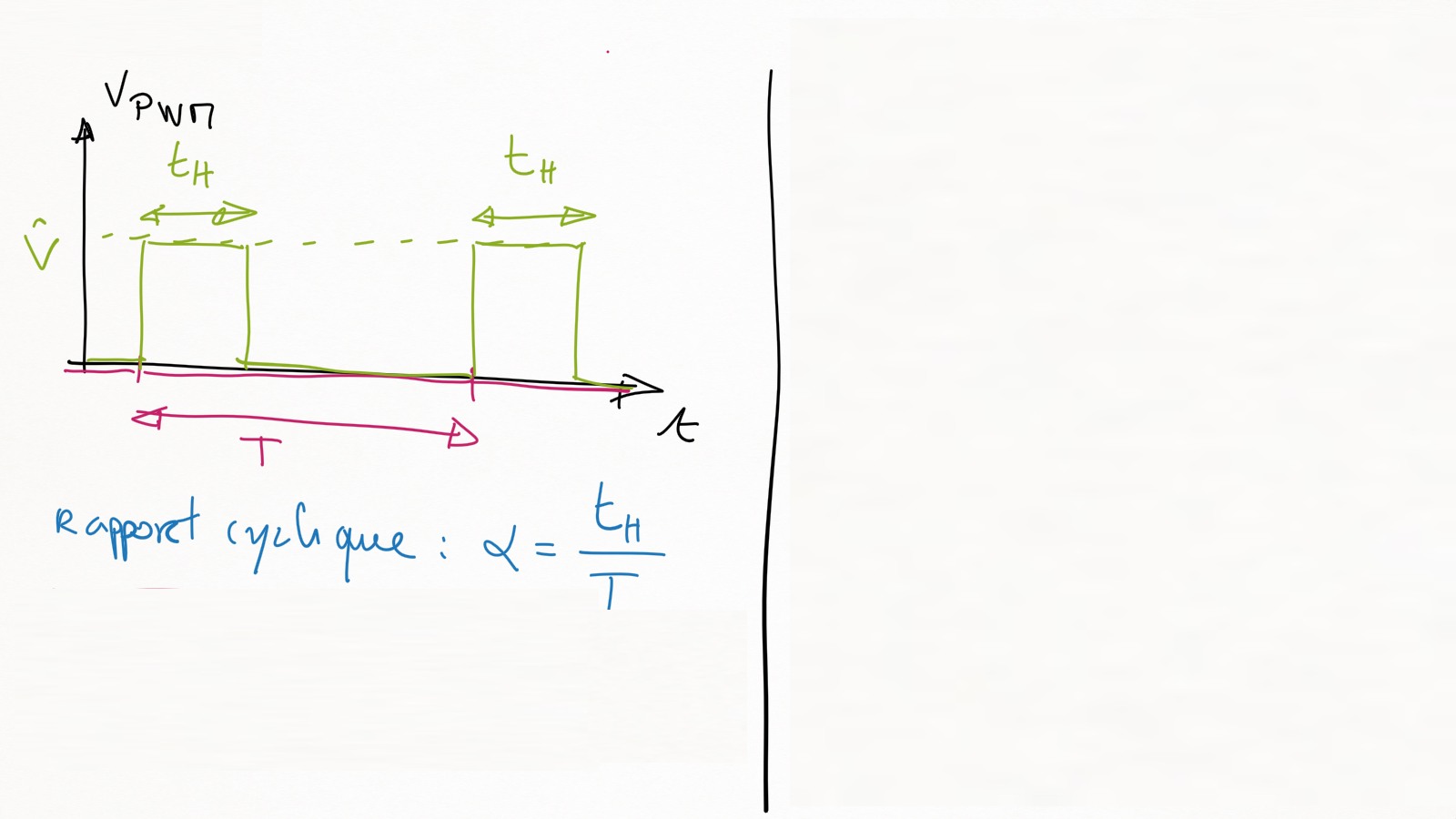
Le réglage du signal PWM se fait par le rapport cyclique (duty cycle)(tH / Tpériode).
La période T reste fixe.
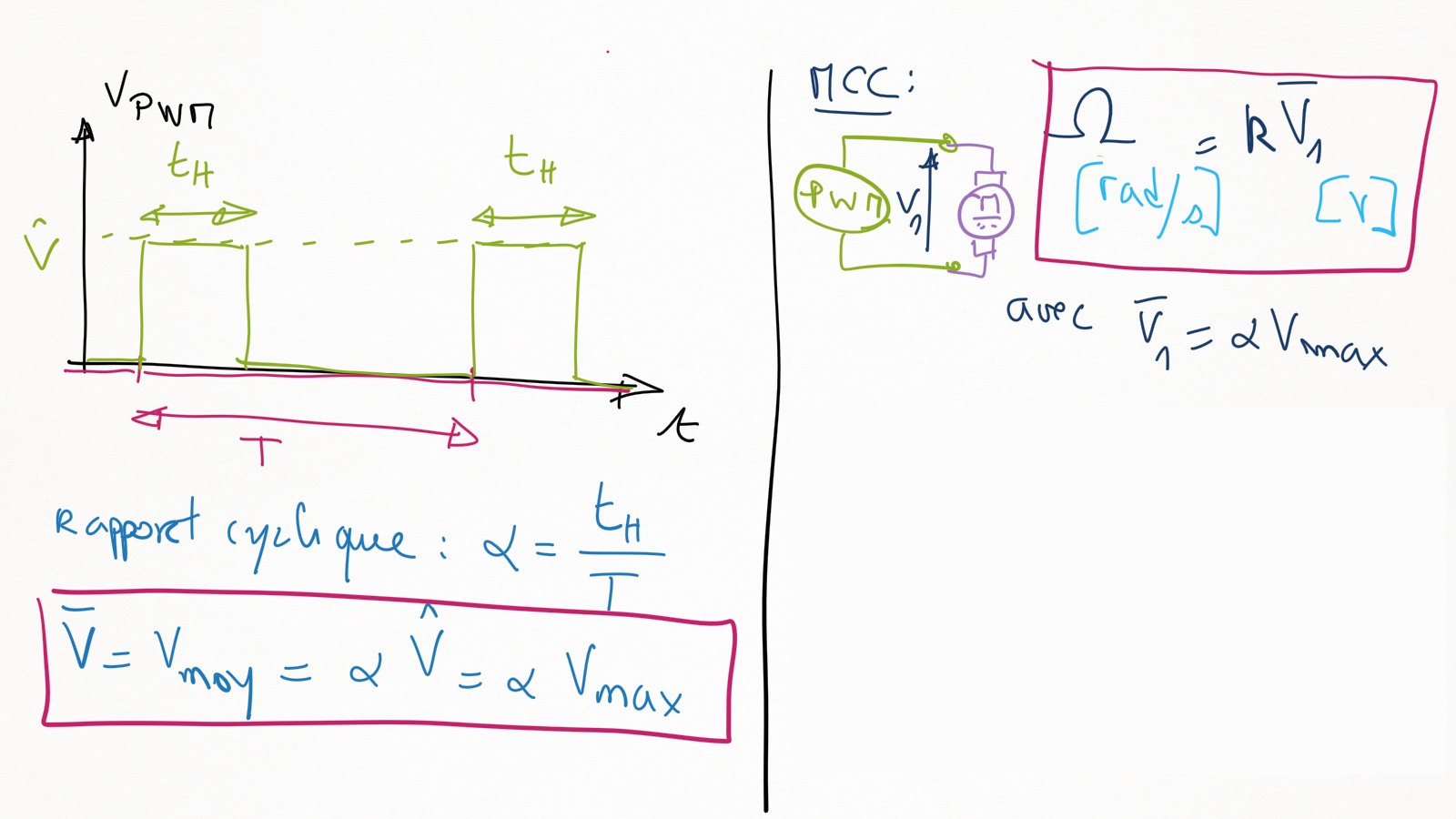
Pour le moteur et les LEDs : le signal PWM contrôle la tension moyenne appliquée.
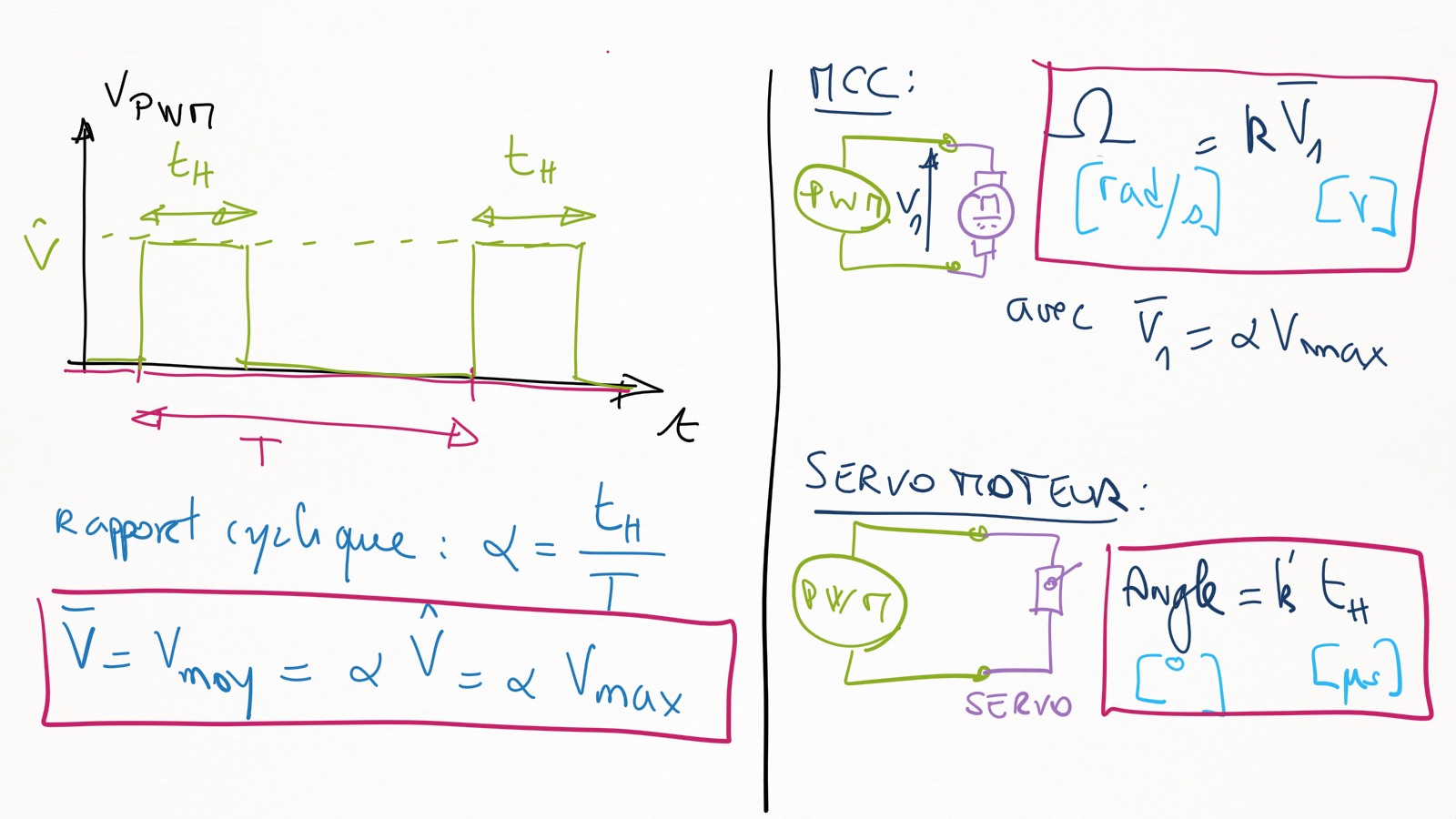
Pour le servomoteur : le signal PWM permet de régler l'angle en jouant sur la durée de l'impulsion.
PWM = pulse width modulation - MLI = modulation en largeur d'impulsion
Fonctionnement :

PWM : contrôle de la vitesse d'un moteur à courant continu
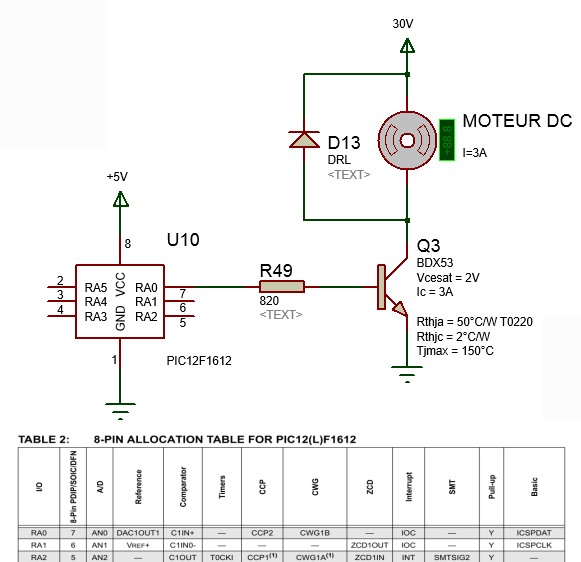
On veut déteminer le rapport cyclique pour une vitesse souhaitée
Noter la relation entre Vitesse(moteur) et Tension (moteur) : Exemple : Vitessemoteur = 3x Umoteur
Noter la relation entre Umoy (tension) et rapport cyclique : Umoy = Umoteur x tH/T
Donc rapport cyclique = tH / T = Vitessemoteur/(3xUmoteur)
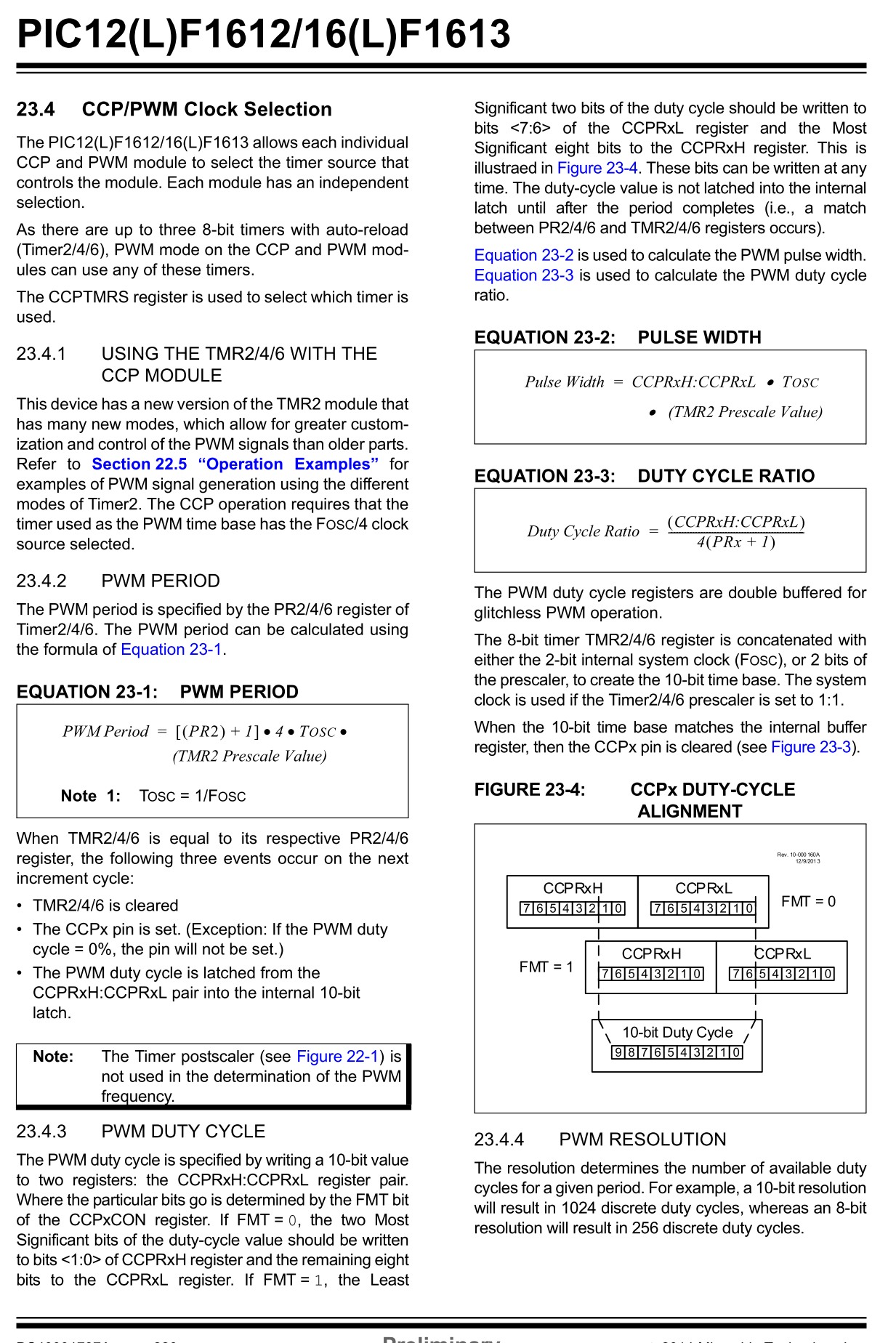
Il faut régler les registres de la PWM2 avec le rapport cyclique calculé et la période de rafaichissement.(doc.technique PWM du 12F1612)
PWM : Contrôle position d'un servomoteur

On veut régler la position (l'angle) du servomoteur
On définit à l'aide de la doc. technique du servomoteur la relation entre l'angle et la largeur d'impulsion
Exemple servo HS311 :
La relation donne :- tH = 1000us pour angle = -45°
- tH = 2000us pour angle = +45°
Remarque :
pour un servomoteur le rapport cyclique ne varie pas de 0 à 100%,
en effet, il peut varier de 5% à 10% afin de satisfaire la commande du servomoteur. Exemple simulateur de servomoteur
De plus le signal doit être répété périodiquement afin de garder du couple sur le servomoteur.
Exemples : A vous de jouer, entraînez vous...
Exemple 1 : en cours
...

{kind=link}